Automatic Change Detection from Visual Surveys
Supervisors:
- Dr. Kevin Köser, GEOMAR - Helmholtz Centre for Ocean Research Kiel, kkoeser@geomar.de
- Prof. Dr. Reinhard Koch, University of Kiel, Institute for Computer Science, rk@informatik.uni-kiel.de
Location: Kiel
Disciplines: Computer Science, computer vision, numerical methods
Keywords: spatio-temporal image processing, machine vision, 3D reconstruction
Motivation: The advance of 3D machine vision technology and underwater imaging systems, together with progress in robotics, are significantly changing the way cameras are used in ocean sciences. Rather than having human experts qualitatively look at few photos that each show a very small part of the ocean floor, dense surveys of football field sized areas can be turned into digital, faithfully colored 3D maps. In the context of fast-growing black smokers, lava flows or other volcanic activities, deep sea mining impact assessment, or for monitoring the ocean floor health (pollution, trawling, dying reefs or dumped world war munitions), repetitive surveys produce a time series of such 3D site maps, which need then be screened for changes.
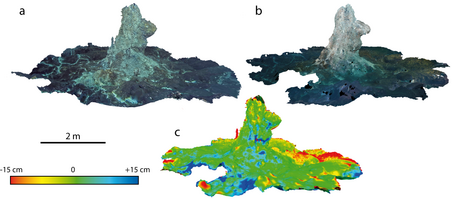
Aim: In this project, machine vision approaches will be extended to automatically register and link such models, and to detect and to quantify temporal changes. The both new and challenging aspect is that all steps (3D model generation, model registration and change detection/quantification) are significantly more difficult underwater than with aerial data, because of attenuation, scattering and illumination effects, floating particles, limited visibility, refraction and difficult localization. We will therefore start from aerial data (e.g. UAV footage of a volcano) to reconstruct and register digital elevation models (e.g. existing data before and after an eruption) and investigate appropriate 3D change detection methods. The methodology should then be adapted for the underwater case, including full 3D structure (overhangs, caves,) and color uncertainties.
Objectives: (1) Develop automatic visual change detection and quantification for low flying platforms. (2) Design appropriate underwater methodology considering geometric/ radiometric effects and ocean realities, also at large scale. (3) Investigate quantitative and qualitative differences between aerial and underwater surveys.
References:
- A. Jordt, K. Köser, and R. Koch: Refractive 3D reconstruction on underwater images, Methods in Oceanography, vol. 15–16, 2016, pp. 90-113, doi: 10.1016/j.mio.2016.03.001.
- T. Kwasnitschka, K. Köser, J. Sticklus, M. Rothenbeck, T. Weiß, E. Wenzlaff, T. Schoening, L. Triebe, A. Steinführer, C. Devey, J. Greinert: DeepSurveyCam—A Deep Ocean Optical Mapping System. Sensors 2016, 16, 164. doi 10.3390/s16020164
- A. Taneja, L. Ballan and M. Pollefeys, "Geometric Change Detection in Urban Environments Using Images, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 37, no. 11, pp. 2193-2206, Nov. 1 2015. doi: 10.1109/TPAMI.2015.